絕對式編碼器相位對齊方法解析
絕對式編碼器的相位對齊是確保編碼器檢測相位與電機電角度相位一致的重要步驟,無論是單圈還是多圈編碼器,其原理基本相似。西安德伍拓自動化為大家詳細介紹絕對式編碼器相位對齊的幾種方法。

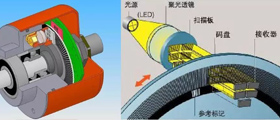
圖為不同絕對值編碼器的碼盤反饋照片
一、傳統方法(基于最高計數位引腳)
對于早期的絕對式編碼器,通常會通過單獨的引腳給出單圈相位的最高位電平。利用此電平的0和1翻轉,可以實現編碼器和電機的相位對齊。具體步驟如下:
使用直流電源給電機的UV繞組通以小于額定電流的直流電,將電機軸定向至一個平衡位置。
用示波器觀察絕對編碼器的最高計數位電平信號。
調整編碼器轉軸與電機軸的相對位置,觀察最高計數位信號的跳變沿,直到跳變沿準確出現在電機軸的定向平衡位置處。
鎖定編碼器與電機的相對位置關系。
驗證對齊效果,來回扭轉電機軸,撒手后若電機軸每次自由回復到平衡位置時,跳變沿都能準確復現,則對齊有效。
然而,隨著技術的發展,目前廣泛采用EnDAT、BiSS、Hyperface等串行協議以及日系專用串行協議的新型絕對式編碼器已經取代了這類編碼器,因此最高位信號不再存在,對齊方法也有所變化。
二、EEPROM存儲法
對于采用EEPROM存儲法的絕對式編碼器,對齊過程更為簡單。具體步驟如下:
將編碼器隨機安裝在電機上,固結編碼器轉軸與電機軸,以及編碼器外殼與電機外殼。
使用直流電源給電機的UV繞組通以小于額定電流的直流電,將電機軸定向至一個平衡位置(通常為-30度電角度方向)。
用伺服驅動器讀取絕對編碼器的單圈位置值,并存入編碼器內部記錄電機電角度初始相位的EEPROM中。
對齊過程結束。此后,驅動器將任意時刻的單圈位置檢測數據與EEPROM中的存儲值做差,并進行必要的換算,即可得到電機電角度相位。
這種方法無需調整編碼器和電機軸之間的角度關系,操作簡單,工藝性好。
三、其他方法
如果絕對式編碼器既沒有可供使用的EEPROM,又沒有可供檢測的最高計數位引腳,則對齊方法會相對復雜。如果驅動器支持單圈絕對位置信息的讀出和顯示,可以考慮通過調整編碼器轉軸與電機軸的相對位置,使顯示的單圈絕對位置值充分接近根據電機的極對數折算出來的電機-30度電角度所應對應的單圈絕對位置點,然后鎖定編碼器與電機的相對位置關系。
如果用戶連絕對值信息都無法獲得,則只能借助原廠的專用工裝進行調整。
綜上所述,EEPROM存儲法是一種簡單、實用、適應性好的相位對齊方法,便于用戶自行安裝編碼器并完成電機電角度的相位整定。因此,我們推薦采用這種方法進行編碼器的相位對齊。
了解更多
編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn